WALL·E Inspired Robot Project
(Page 2 of 3)
Here there is a few more WALL·E photos and a list of his features presented.
"More..." below either leads to additional description or to the additional
links which may help to find additional information.
Photos
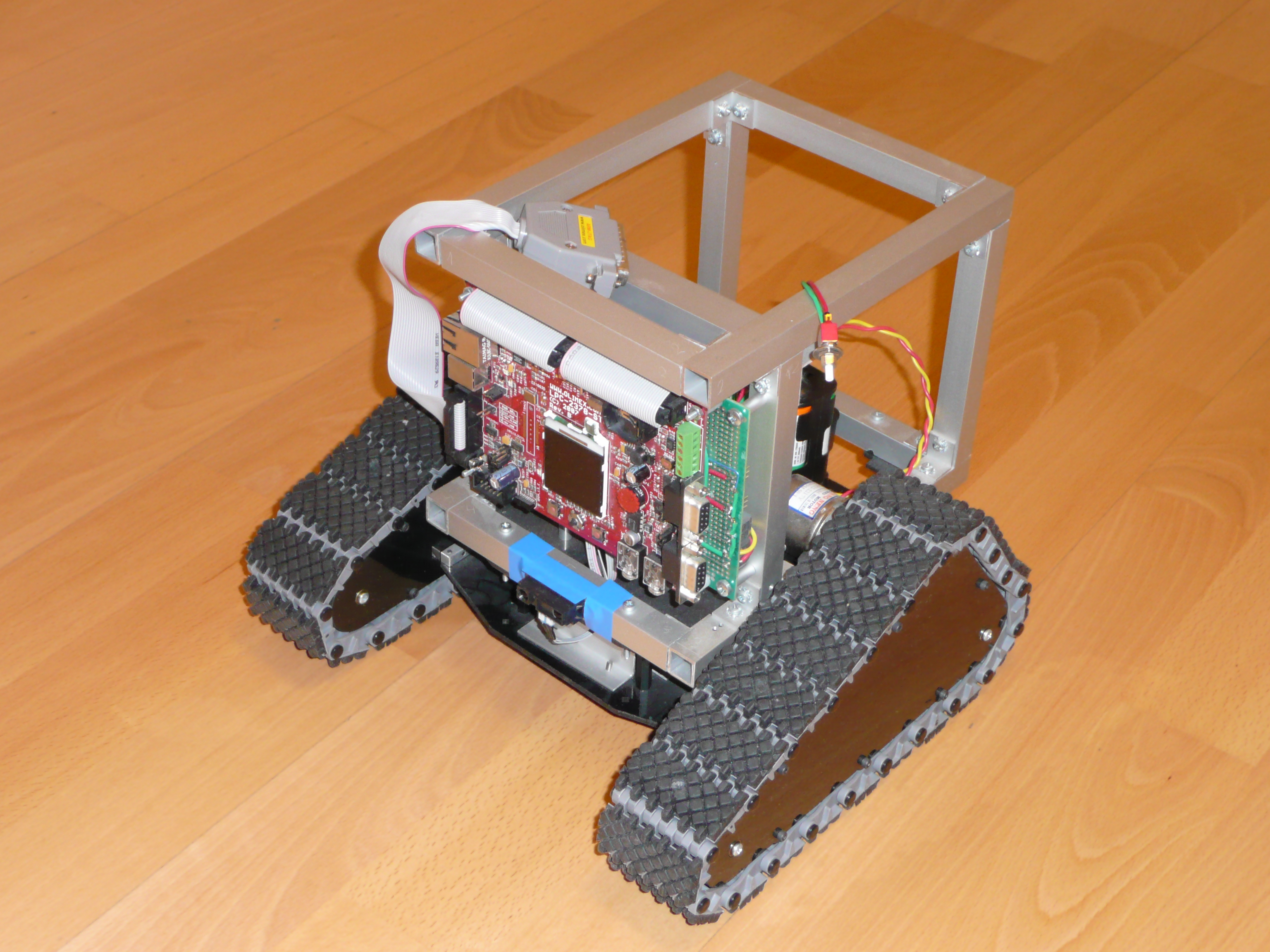
Wall-e in 2012 (head not yet developed)
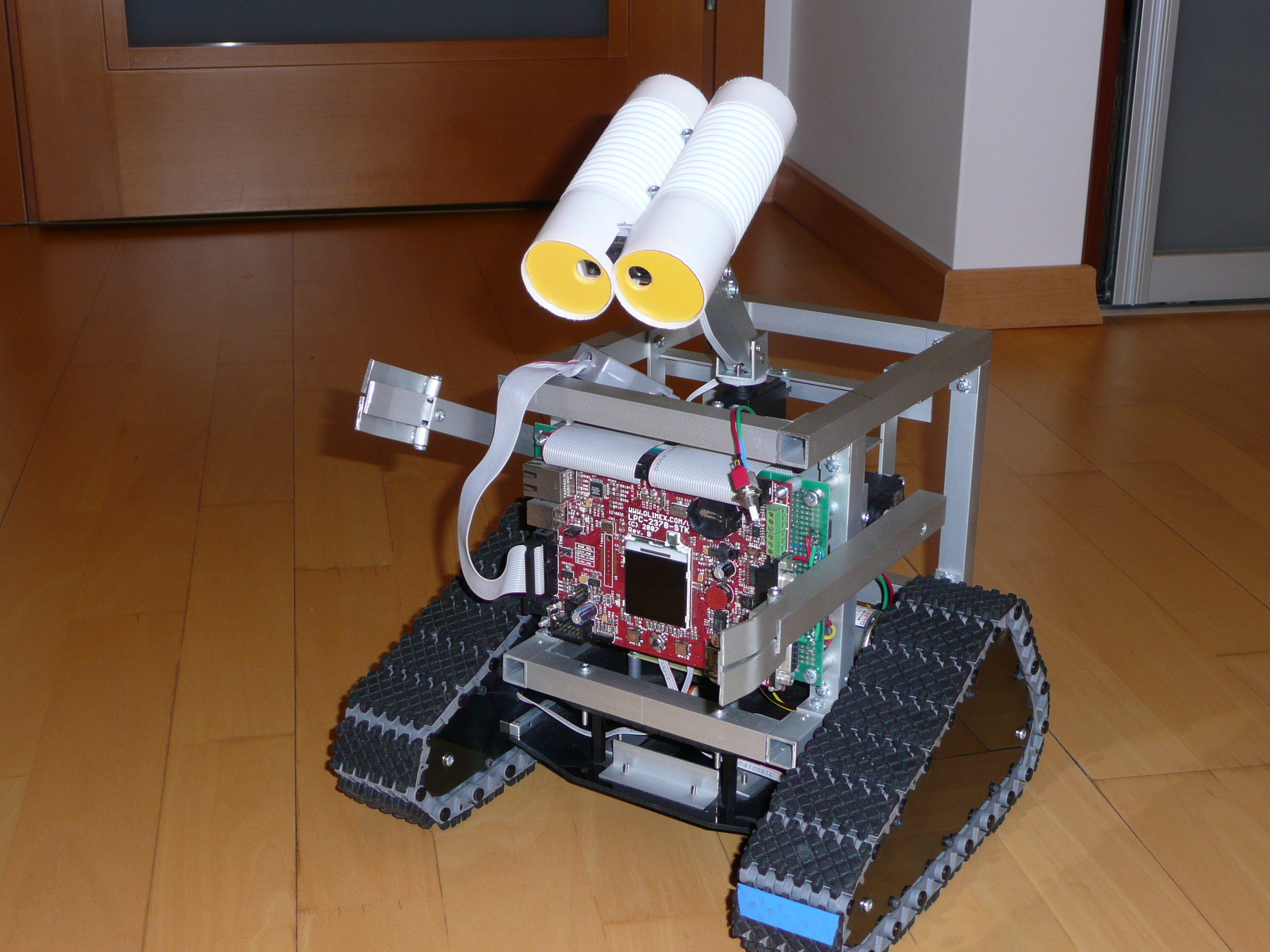
Wall-e in 2013 (no VRM, no US module)
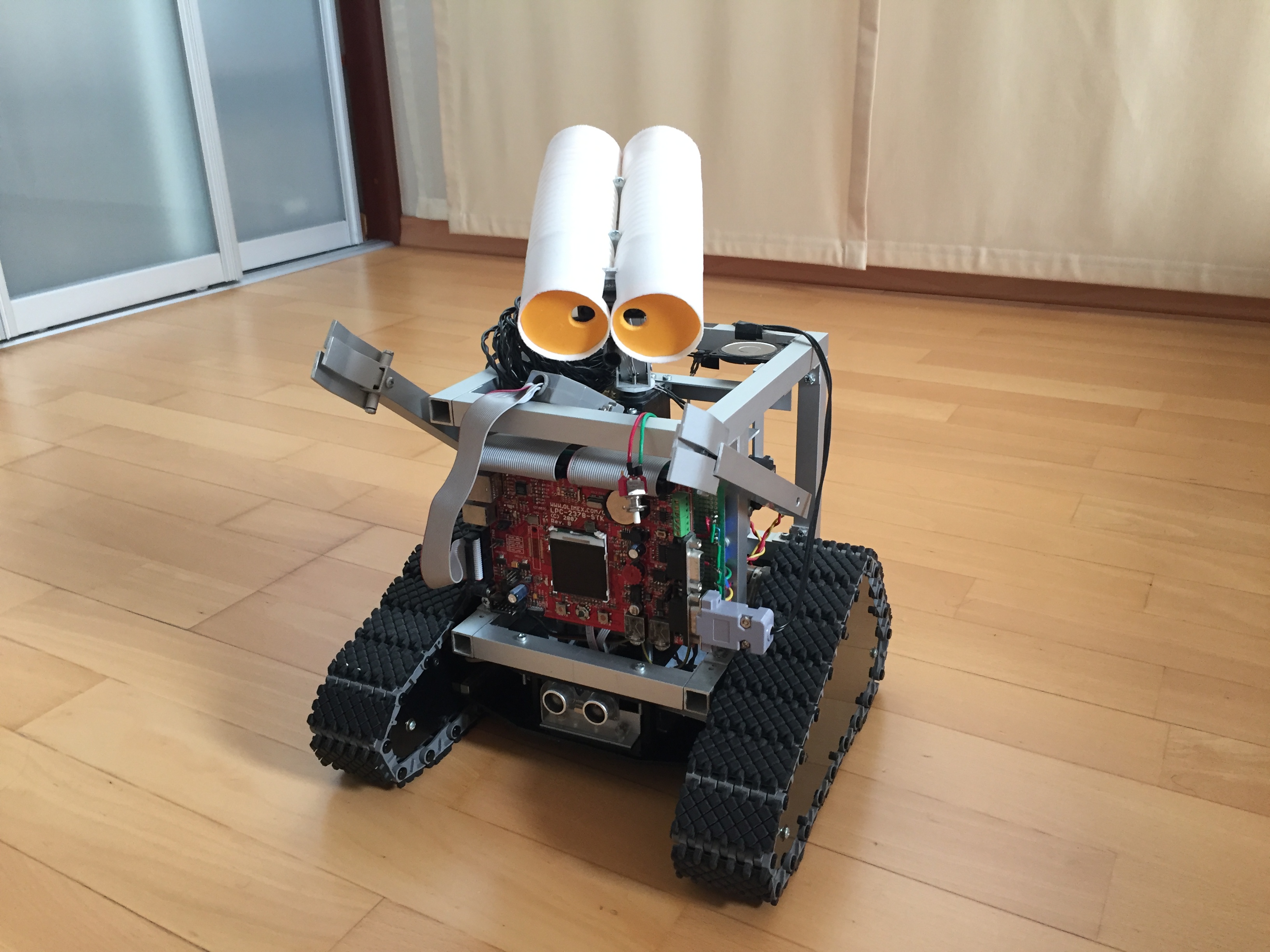
Wall-e in 2018 (current state)
General Features
Hardware
- OLIMEX LPC2378-STK development board used as Wall-e controller. More...
- OLIMEX ARM J-TAG (parallel port driven) for flashing and debugging. More...
- Lynxmotion tri-track chassis kit. More...
- L298 integrated circuit based motor driver (self-developed). More...
- Main interface board (self-developed) to connect various sensors and actuators. More...
- Supportive interface board (self-developed) with angular rate sensor (ARS), front light source detector, and back daylight sensor. More...
- Tracks optical encoders (self-made). More...
- HITEC HS-325HB servos for the arms (left and right) and for the head. More...
- Sharp GP2D12 distance detector. More...
- HC-SR04 Ultrasonic Sensor (US) (distance detector). More...
- EasyVR 3 a multi-purpose speech recognition module (VRM) plus a speaker and microphone. More...
- KPX 612 05B Dynamic buzzer. More...
- Three battery packs for servo, tracks and electronics powering. More...
- Dimension: 30[cm]x30[cm]x37[cm] (11.81[in]x11.81[in]x14.57[in]). More...
- Weight (with batteries): ~2.5[kg] (~5,51[lbs]).
Software
- Assembler, C and C++ written software. 179kB executable (optimization turned off). More...
- Layered software architecture. More...
- uC/OS-II Real Time Operating System (RTOS) to assure real-time multitasking. More...
- C++, object oriented RTOS wrapper (self-developed). More...
- C++ template based publish/subscribe middleware (self-developed). More...
- Instead of C and C++ standard libraries self-developed functions are used. More...
- Self-developed memory management for full control of C malloc/free and C++ new/delete functions. More...
- 13 so named managers (subscribers/publishers) and all together 17 RTOS tasks. More...
- 2D occupancy grid (3x3 cells) with distance sensors fusion for obstacle detection. More...
- (Naive) path planning based on 2D occupancy grid. More...
- Wall-e tilt detection. More...
- Simple Wall-e Graphic Library for LCD display management (self-developed). More...
- Wall-e Simple Sequencer (interpreter) for basic action and move sequencies programing. More...
- Basic voice command control. More...
- RS-232 (serial) interface for diagnostic and debugging (with build-in debugger). More...
- 3 main functions (voice, onboard keyboard, or remote control selected):
- Bath - gets my wife from the bath
- Test - a few move sequences to check hw/sw
- Enjoy - some simple Wall-e movement
More...
Software Development Environment
All development environment (except Windows OS was free).
- Windows XP host development environment. More...
- Cygwin 1.7.13 toolset. More...
- GNU ARM toolchain with gcc 4.1.1. More...
- OpenOCD to debug with GDB and Insight Debugger. More...
- Eclipse 3.3.2 (Europa) with CDT (Note: Eclipse requires Java Runtime). More...
- H-JTAG software version 0.6.1 for LPC2378 flashing. More...
- Easy VR Commander for Voice Recognition Module programming. More...